
Εισαγωγή
Αρχικά (2013) ο δικτυακός τόπος δημιουργήθηκε με τη φιλοδοξία να χρησιμοποιηθεί από τους μαθητές της 6ης Τάξης του δημοτικού ως μια πρώτη εισαγωγή στο χώρο της ρομποτικής. Το υλικό που αναρτάται θα αξιοποιηθεί στο μάθημα Τεχνολογίες Πληροφορίας και Επικοινωνιών (ΤΠΕ) στο Δημοτικό.
Οι αναμενόμενοι στόχοι είναι οι μαθητές να μπορέσουν ακολουθώντας μια σειρά από δραστηριότητες να:
- εξοικειωθούν με διαδικασίες προγραμματισμού στην πλατφόρμα του Scratch πού έχουν ήδη γνωρίσει
- γνωρίσουν τον υπέροχο κόσμο της ρομποτικής και τη χρησιμότητά του
- γνωρίσουν τον μικροελεγκτή Arduino
- δημιουργήσουν ένα δικό τους απλό ρομπότ με μικρό κόστος
- προγραμματίσουν το ρομπότ τους μέσα από την πλατφόρμα S4A (μια παραλλαγή του Scratch)
- δοκιμάσουν τη λειτουργία της κατασκευής τους
- εμπνευστούν για μελλοντικές βελτιώσεις ή τροποποιήσεις
Η εργασία μας (1η κατασκευή) παρουσιάστηκε στο 4ο Μαθητικό Φεστιβάλ Ψηφιακής Δημιουργίας (Απρίλιος 2014) στην πόλη της Καλαμάτας.
Η εργασία μας (2η κατασκευή) παρουσιάστηκε στο 6ο Μαθητικό Φεστιβάλ Ψηφιακής Δημιουργίας (Απρίλιος 2016) στην πόλη της Καλαμάτας.
Η 3η κατασκευή παρουσιάστηκε στο 7ο Μαθητικό Φεστιβάλ Ψηφιακής Δημιουργίας (Απρίλιος 2017) στην πόλη της Καλαμάτας.
Η 4η κατασκευή (ρομπότ Otto) παρουσιάστηκε στο 8ο Μαθητικό Φεστιβάλ Ψηφιακής Δημιουργίας (Απρίλιος 2018) στην Καλαμάτα.
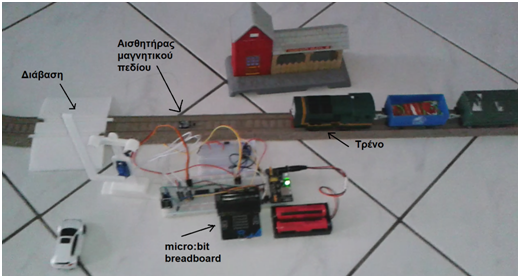
Η 5η κατασκευή (έλεγχος διάβασης τρένου) παρουσιάστηκε στο 9ο Μαθητικό Φεστιβάλ Ψηφιακής Δημιουργίας (Απρίλιος 2019) στην Καλαμάτα, ενώ διακρίθηκε και στον 1ο Πανελλήνιο Διαγωνισμό Ανοικτών Τεχνολογιών.
Στη συνέχεια ξεκίνησε η εκπαιδευτική αξιοποίηση και άλλων μικροελεγκτών ή μικροϋπολογιστών.
Υπεύθυνος καθηγητής: Μιχαλόπουλος Γιάννης (ΠΕ86)
Η 1η κατασκευή

|
Η κατασκευή του ρομπότ θα γίνει από μαθητές της ΣΤ' τάξης. Συνεπώς θα γίνει προσπάθεια όλη η κατασκευή, υλοποίηση και προγραμματισμός των κινήσεων να είναι όσο το δυνατόν πιο απλές. Άλλωστε ο σκοπός μας είναι η πρώτη επαφή των μαθητών με το χώρο της ρομποτικής.
Το ρομπότ θα κάνει μέσω υπολογιστή μόνο απλές κινήσεις. Δεν θα είναι εφοδιασμένο με αισθητήρες, αφού αυτό θα έκανε πιο σύνθετο το προγραμματισμό και θα αύξανε το κόστος υλοποίησης. Σε επόμενο επίπεδο και αφού οι μαθητές το επιθυμούν, θα μπορούσαν να αναζητήσουν τρόπους να κατασκευάσουν ένα πιό σύνθετο ρομποτικό όχημα με αισθητήρες ώστε να αποφεύγει εμπόδια ή να είναι πλήρως αυτόνομο. Βέβαια αυτό θα ήταν δυσκολότερο στην υλοποίηση, ενώ η πλατφόρμα προγραμματισμου (S4A) δεν θα ήταν αρκετή και θα έπρεπε να προγραμματίσουν στο περιβάλλον του Arduino (IDE). Θα δοθούν πάντως σχετικοί σύνδεσμοι με πληροφορίες για το πως θα μπορούσαν να εξελίξουν το όχημα, ώστε αυτό να γίνει αυτόνομο. Υπάρχει πολύ υλικό στο διαδίκτυο για τέτοιου είδους κατασκευές. Τέλος, θα γίνει προσπάθεια να περιοριστεί το κόστος κατασκευής του όλου έργου στα περίπου 20 -25€. |
Η 2η κατασκευή

Η 2η κατασκευή στηρίζεται στο ρομποτικό όχημα που δημιουργήθηκε από την κατασκευή 1. Στο όχημα αυτό προστέθηκε ένας 3πλός ανιχνευτής γραμμής, ενώ ο προγραμματισμός του αυτόνομου οχήματος έγινε με τη βοήθεια του Ardublock στο Arduino.
Το όχημα τώρα είναι πλήρως αυτόνομο και να μπορεί να κινηθεί μόνο του ακολουθώντας μια γραμμή στο έδαφος που μπορούμε να σχεδιάσουμε με μαύρο μαρκαδόρο ή με μαύρη μονωτική ταινία.
Το κόστος της προσθήκης δεν ξεπερνά τα 5 €.
Το όχημα τώρα είναι πλήρως αυτόνομο και να μπορεί να κινηθεί μόνο του ακολουθώντας μια γραμμή στο έδαφος που μπορούμε να σχεδιάσουμε με μαύρο μαρκαδόρο ή με μαύρη μονωτική ταινία.
Το κόστος της προσθήκης δεν ξεπερνά τα 5 €.
H 3η κατασκευή

|
Η 3η κατασκευή προσομοιώνει τη λειτουργία ενός "έξυπνου" πάρκινγκ αυτοκινήτων που καταμετρά αυτόματα τα αυτοκίνητα, ανοιγοκλείνει την μπάρα εισόδου και εμφανίζει σε οθόνη τις διαθέσιμες θέσεις. Ο προγραμματισμός της λειτουργίας του έγινε με τη βοήθεια του γραφικού περιβάλλοντος προγραμματισμού (Ardublock) του μικροελεγκτή Arduino.
|
Η 4η κατασκευή

|
Το ρομπότ Otto είναι ένα έργο ανοικτού κώδικα, συμβατό με το Arduino, εκτυπώσιμο από 3D εκτυπωτή και αποτελεί μια πραγματική ευκαιρία για να γνωρίσει κάποιος το χώρο της ρομποτικής αλλά και να διασκεδάσει.
|
Η 5η κατασκευή
|
Τρόπος οργάνωσης - εργασίας
Για την ολοκλήρωση κάθε έργου (Project) όλοι οι μαθητές του τμήματος χωρίστηκαν σε 4 ομάδες των 5 μαθητών.Κάθε ομάδα έχει τον φακελό της:
Σε κάθε οι ομάδα οι μαθητές συζητούν και επιλέγουν με τι θα ασχοληθούν. Ορίζεται ένας συντονιστής της ομάδας που θα έχει την ευθύνη του φακέλου της ομάδας και θα επικοινωνεί με τον καθηγητή τους και θα μεταφέρει απαραίτητες οδηγίες. Οι μαθητές χωρίζονται για τις ανάγκες του έργου ανάλογα με τις απαραίτητες εργασίες σε:
Με τον τρόπο αυτό οργάνωσης δίνεται η δυνατότητα κατά τη διάρκεια του έργου οι μαθητές εκτός από την ρομποτική:
- για να κρατά τις απαραίτητες σημειώσεις
- οδηγίες για τη συναρμολόγηση
- το πλάνο εργασίας με το χρονοπρογραμματισμό και την καταγραφή σημειώσεων για το τι έκανε σε κάθε μάθημα
- το κιτ για το σασσί του ρομποτικού οχήματος
- το μικροελεγκή arduino
- καλώδια, breadboard, μπαταρίες, εργαλεία
Σε κάθε οι ομάδα οι μαθητές συζητούν και επιλέγουν με τι θα ασχοληθούν. Ορίζεται ένας συντονιστής της ομάδας που θα έχει την ευθύνη του φακέλου της ομάδας και θα επικοινωνεί με τον καθηγητή τους και θα μεταφέρει απαραίτητες οδηγίες. Οι μαθητές χωρίζονται για τις ανάγκες του έργου ανάλογα με τις απαραίτητες εργασίες σε:
- κατασκευαστές του οχήματος
- δημιουργούς της παρουσίασης
- φωτογράφους που παίρνουν εικόνες από τις εργασίες της κατασκευής του οχήματός τους
- προγραμματιστές που θα αναλάβουν την εγκατάσταση στους υπολογιστές τους του απαραίτητου λογισμικού (arduino IDE, S4A)
Φυσικά οι μαθητές μπορούν να αναλαμβάνουν πολλαπλούς ρόλους ή να εναλλάσσονται σε αυτούς.
Τρόπος επικοινωνίας
Με τον τρόπο αυτό οργάνωσης δίνεται η δυνατότητα κατά τη διάρκεια του έργου οι μαθητές εκτός από την ρομποτική:
- να γνωρίσουν τρόπους αξιοποίησης λογισμικού παρουσίασης και τις δυνατότητές του (το οποίο δεν είχαν ξαναχρησιμοποιήσει)
- να εξοικειωθούν περαιτέρω με τη χρήση wiki
- να κάνουν συμπίεση και αποσυμπίεση αρχείων (ελάχιστη εξοικείωση)
- να κάνουν στοιχειώδη επεξεργασία εικόνας
- να προγραμματίσουν και να ελέγξουν την κίνηση ενός φυσικού αντικειμένου μέσα από ένα Scratch περιβάλλον
