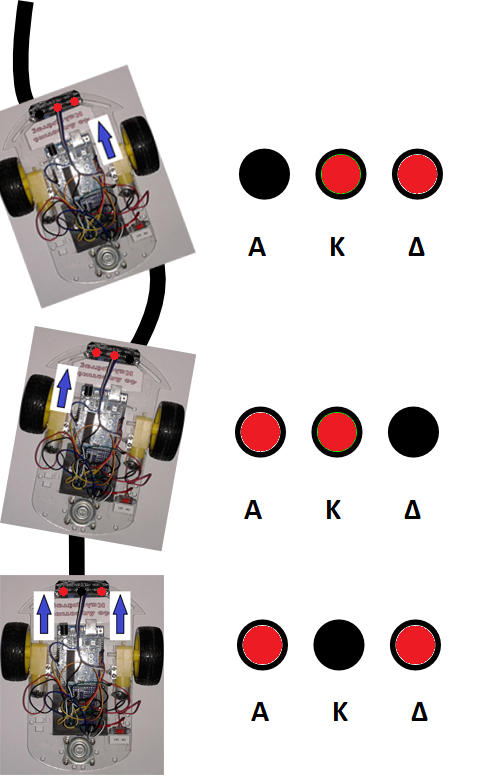
Το παραπάνω σχήμα εξηγεί τη λειτουργία του οχήματος ανάλογα με το ποιος αισθητήρας θα βρεθεί στη μαύρη γραμμή της διαδρομής.
Οι 3 αισθητήρες (Αριστερός, Κεντρικός, Δεξιός) ελέγχονται από τα pin 2,3,4 αντίστοιχα του Arduino. Όταν ο αντίστοιχος αισθητήρας βρεθεί πάνω από τη μαύρη γραμμή τότε δίνει σαν έξοδο την τιμή 1 (High ή ΡΕΥΜΑ) ενώ το αντίστοιχο LED είναι σβηστό. Όταν ο αισθητήρα είναι κάτω από άσπρο χρώμα δίνει σαν έξοδο την τιμή 0 (Low ή ΌΧΙ ΡΕΥΜΑ).
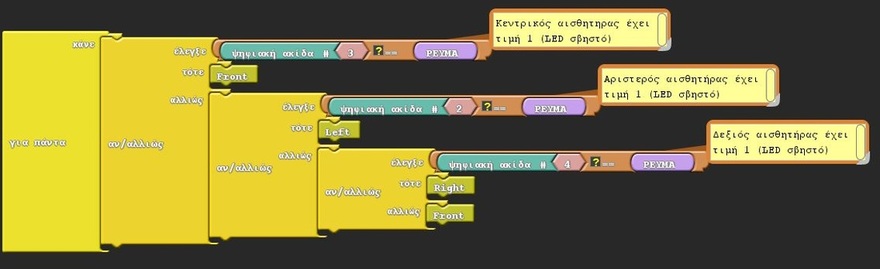
Με τη βοήθεια του Ardublock, και αφού έχουμε ήδη δημιουργήσει τις υπορουτίνες Front, Right, Left, Stop δημιουργούμε το block εντολών που θα εκτελεί συνέχεια το Arduino καθώς το όχημα θα κινείται επί της διαδρομής:
Οι 3 αισθητήρες (Αριστερός, Κεντρικός, Δεξιός) ελέγχονται από τα pin 2,3,4 αντίστοιχα του Arduino. Όταν ο αντίστοιχος αισθητήρας βρεθεί πάνω από τη μαύρη γραμμή τότε δίνει σαν έξοδο την τιμή 1 (High ή ΡΕΥΜΑ) ενώ το αντίστοιχο LED είναι σβηστό. Όταν ο αισθητήρα είναι κάτω από άσπρο χρώμα δίνει σαν έξοδο την τιμή 0 (Low ή ΌΧΙ ΡΕΥΜΑ).
Με τη βοήθεια του Ardublock, και αφού έχουμε ήδη δημιουργήσει τις υπορουτίνες Front, Right, Left, Stop δημιουργούμε το block εντολών που θα εκτελεί συνέχεια το Arduino καθώς το όχημα θα κινείται επί της διαδρομής:
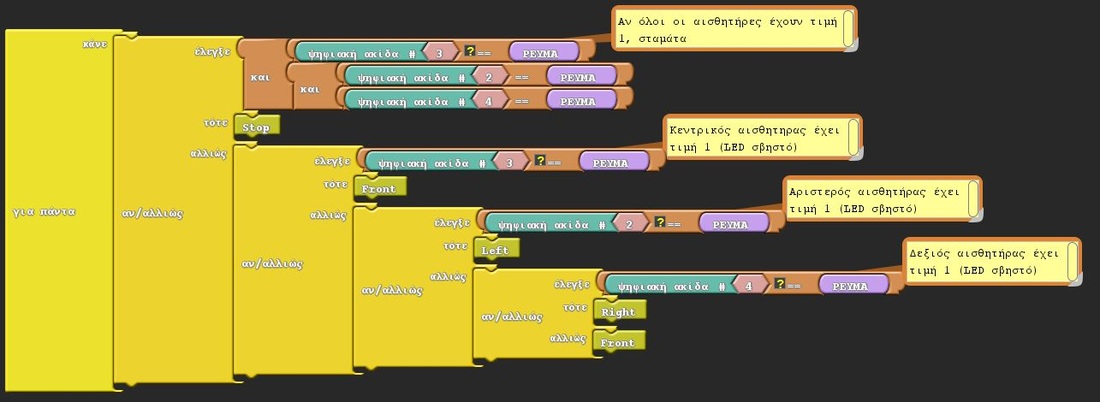
Μπορούμε επιπλέον να προσθέσουμε μια ακόμα κατάσταση όπου και οι 3 αισθητήρες είναι πάνω από μαύρο χρώμα. Σ' αυτή την περίπτωση θέλουμε το όχημα να σταματά. Ο αντίστοιχος κώδικας παίρνει τη μορφή:
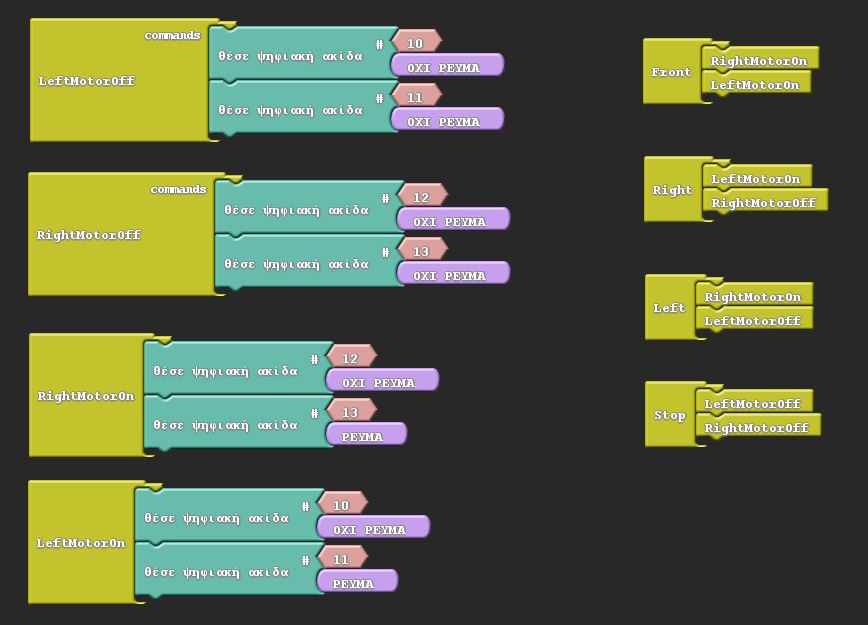
Οι αντίστοιχες υπορουτίνες είναι: