Βασικές Κινήσεις
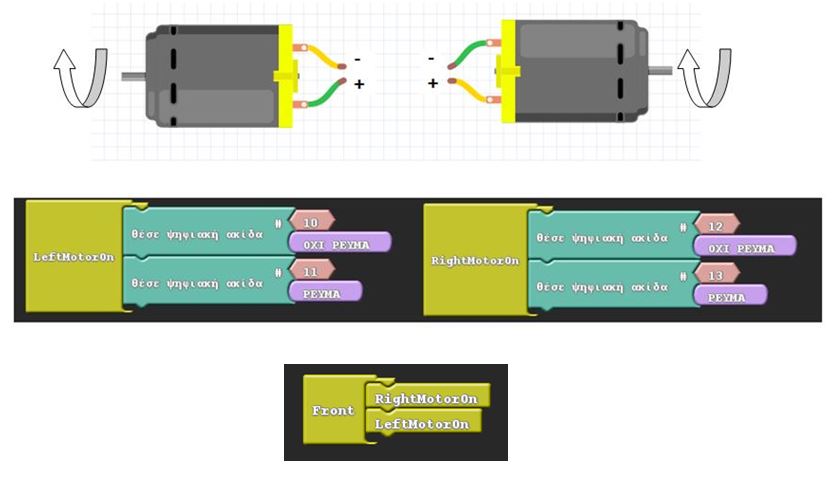
1. Κίνηση προς τα εμπρός
Για την κίνηση το οχήματος προς τα εμπρός θα πρέπει να κινηθούν και οι 2 τροχοί προς την ίδια κατεύθυνση.
Ο αριστερός τροχός ελέγχεται από τις ψηφιακές εξόδους 10,11 του Arduino.
Ο δεξιός τροχός ελέγχεται από τις ψηφιακές εξόδους 12,13 του Arduino.
Στο περιβάλλον του Ardublock δημιουργούμε τις υπορουτίνες (subroutines):
- LeftMotorOn για την κίνηση του αριστερού μοτέρ
- RightMotorOn για την κίνηση του δεξιού μοτέρ
- Front για την κίνηση προς τα εμπρός με την κλήση των 2 παραπάνω ρουτινών που θέτουν σε λειτουργία τα 2 μοτέρ
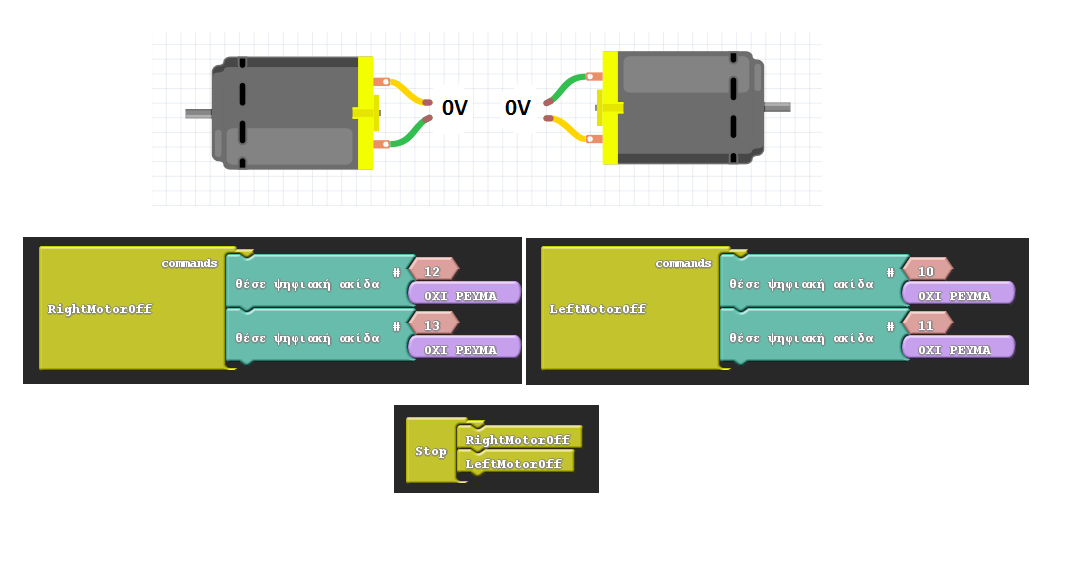
2. Σταμάτημα οχήματος
Για να σταματήσει το όχημα θα πρέπει να σταματήσουν και τα 2 μοτέρ που κινούν τους τροχούς του οχήματος
Στο περιβάλλον του Ardublock δημιουργούμε τις υπορουτίνες:
- LeftMotorOff για σταμάτημα του αριστερού μοτέρ
- RightMotorOff για σταμάτημα του δεξιού μοτέρ
- Stop για το σταμάτημα και των 2 μοτέρ