Έλεγχος λειτουργίας και Προγραμματισμός του οχήματος
Αφού ολοκληρώσουμε με προσοχή τις συνδέσεις του Arduino με τα υπόλοιπα ηλεκτρονικά στοιχεία και τους 2 κινητήρες του οχήματος σύμφωνα με το διάγραμμα που είδαμε σε προηγούμενη σελίδα, καθώς και την εγκατάσταση του απαραίτητου λογισμικού (Arduino IDE, firmware, S4A), ήρθε η ώρα να ελέγξουμε την λειτουργία του μέσα από το περιβάλλον του S4A.
1. Αρχικό σενάριο για το ρομποτικό μας όχημα
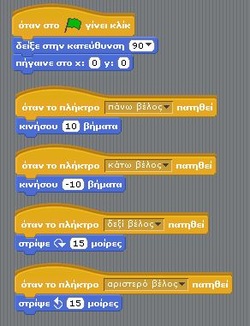
Θέλουμε στο S4A να εισάγουμε ως ενδυμασία την εικόνα του οχήματός μας.
Πατώντας το σημαιάκι, θέλουμε το όχημά μας να πηγαίνει στο κέντρο της σκηνής (0,0) και να κοιτάζει δεξιά.
Στη συνέχεια θέλουμε να κινείται μπρος, πίσω, αριστερά, δεξιά με τη χρήση των 4 πλήκτρων με τα βελάκια του πληκτρολογίου:
Φυσικά το εικονιζόμενο σενάριο, θα κινεί το οχημά μας στη σκηνή, όχι όμως και το ρομποτικό μας όχημα που έχουμε συνδέσει με usb καλώδιο με τον υπολογιστή μας.
Αυτό που μένει λοιπόν, είναι πως θα καταφέρουμε να αντιστοιχίσουμε τις εντολές "κινήσου 10 βήματα" ή "κινήσου -10 βήματα" με τις κινήσεις μπροστά και πίσω του ρομπότ, αλλά και τις εντολές "στρίψε .. μοίρες" ή "στρίψε ..μοίρες" με τη στροφή του ρομπότ.
Όπως εξηγήθηκε παραπάνω στη σελίδα "Η κίνηση του ρομπότ", αυτό θα γίνει με τον έλεγχο της λειτουργίας των 2 κινητήρων από τις ψηφιακές εξόδους 12,13 και 11,10 του Arduino.
Στον πίνακα που ακολουθεί, μπορούμε να δούμε πως μπορούμε να αντιστοιχίσουμε τις εντολές κινήσου, στρίψε με τις εντολές digital on, digital off, που ελέγχουν την τροφοδοσία των 2 κινητήρων.
Θέλουμε στο S4A να εισάγουμε ως ενδυμασία την εικόνα του οχήματός μας.
Πατώντας το σημαιάκι, θέλουμε το όχημά μας να πηγαίνει στο κέντρο της σκηνής (0,0) και να κοιτάζει δεξιά.
Στη συνέχεια θέλουμε να κινείται μπρος, πίσω, αριστερά, δεξιά με τη χρήση των 4 πλήκτρων με τα βελάκια του πληκτρολογίου:
- Πατώντας το πάνω βελάκι --> Να κινείται μπροστά για λίγο
- Πατώντας το κάτω βελάκι --> Να κινείται πίσω για λίγο
- Πατώντας το αριστερό βελάκι --> Να στρίβει λίγο αριστερά
- Πατώντας το δεξί βελάκι --> Να στρίβει λίγο δεξιά
Φυσικά το εικονιζόμενο σενάριο, θα κινεί το οχημά μας στη σκηνή, όχι όμως και το ρομποτικό μας όχημα που έχουμε συνδέσει με usb καλώδιο με τον υπολογιστή μας.
Αυτό που μένει λοιπόν, είναι πως θα καταφέρουμε να αντιστοιχίσουμε τις εντολές "κινήσου 10 βήματα" ή "κινήσου -10 βήματα" με τις κινήσεις μπροστά και πίσω του ρομπότ, αλλά και τις εντολές "στρίψε .. μοίρες" ή "στρίψε ..μοίρες" με τη στροφή του ρομπότ.
Όπως εξηγήθηκε παραπάνω στη σελίδα "Η κίνηση του ρομπότ", αυτό θα γίνει με τον έλεγχο της λειτουργίας των 2 κινητήρων από τις ψηφιακές εξόδους 12,13 και 11,10 του Arduino.
Στον πίνακα που ακολουθεί, μπορούμε να δούμε πως μπορούμε να αντιστοιχίσουμε τις εντολές κινήσου, στρίψε με τις εντολές digital on, digital off, που ελέγχουν την τροφοδοσία των 2 κινητήρων.
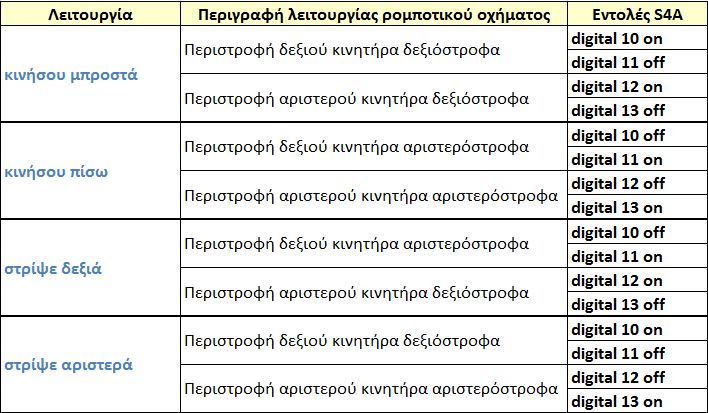
Φυσικά αμέσως μετά την τροφοδοσία των κινητήρων θα πρέπει να διακόπτουμε μετά από λίγο χρόνο (π.χ. 0.1 δευτερόλεπτα) τη λειτουργία τους κάνοντας όλες τις ψηφιακές εξόδους 10,11,12,13 off. Διαφορετικά το όχημα θα κινείται διαρκώς επαναλαμβάνοντας την τελευταία κίνηση.
2. Πρώτο σενάριο ελέγχου της κίνησης του ρομποτικού οχήματος
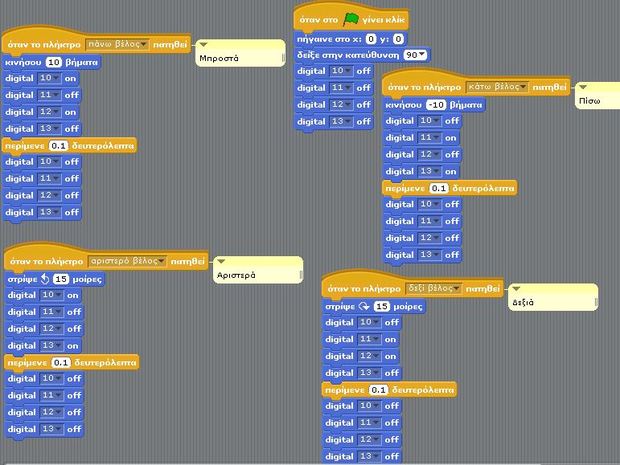
Σύμφωνα με τα παραπάνω το σενάριο για την κίνηση του οχήματος γίνεται όπως στη διπλανή εικόνα.
Υλοποιήστε το και δοκιμάστε αν κινείται το ρομποτικό όχημα όπως περιμέναμε. (Θα πρέπει να συνδέσετε το όχημα με τον υπολογιστή με κατάλληλο καλώδιο USB και να βάλετε 4 ΑΑ μπαταρίες).
Αφού κάνετε τις απαραίτητες δοκιμές, παρατηρήστε την κίνηση του οχήματος όταν πατάτε συνεχόμενα ένα από τα 4 βέλη. Πιστεύετε ότι υπάρχει τρόπος να βελτιώσουμε την κίνηση;
Σύμφωνα με τα παραπάνω το σενάριο για την κίνηση του οχήματος γίνεται όπως στη διπλανή εικόνα.
Υλοποιήστε το και δοκιμάστε αν κινείται το ρομποτικό όχημα όπως περιμέναμε. (Θα πρέπει να συνδέσετε το όχημα με τον υπολογιστή με κατάλληλο καλώδιο USB και να βάλετε 4 ΑΑ μπαταρίες).
Αφού κάνετε τις απαραίτητες δοκιμές, παρατηρήστε την κίνηση του οχήματος όταν πατάτε συνεχόμενα ένα από τα 4 βέλη. Πιστεύετε ότι υπάρχει τρόπος να βελτιώσουμε την κίνηση;
