Συναρμολογούμε βήμα - βήμα το σασσί

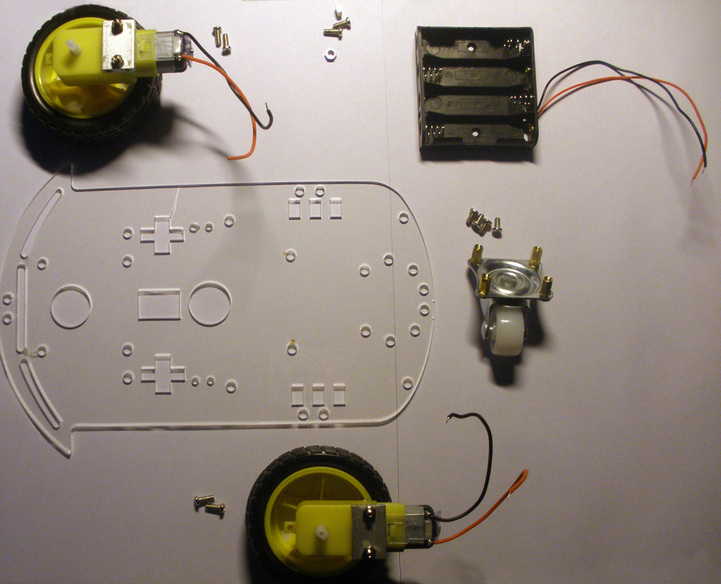
1. Παίρνουμε το κιτ που περιλαμβάνει όλα τα απαραίτητα εξαρτήματα για να συναρμολογήσουμε το σασσί του ρομπότ. Ξετιλύγουμε το περιεχόμενο και διαχωρίζουμε τα υλικά:
- πλαστική διαφανή βάση
- ρόδες
- κινητήρες
- μπαταριοθήκη
- βίδες και παξιμάδια

2. Στην εικόνα που εμφανίζεται φαίνονται όλα τα μέρη που περιλαμβάνει το κιτ.
Αφαιρούμε το προστατευτικό αυτοκόλλητο από τις 2 πλευρές της βάσης.
Στη συνέχεια θα προχωρήσουμε με την στερέωση των 2 μοτέρ με 2 μακριές βίδες των 2cm στα 2 αλουμινένια στηρίγματα.
Αφαιρούμε το προστατευτικό αυτοκόλλητο από τις 2 πλευρές της βάσης.
Στη συνέχεια θα προχωρήσουμε με την στερέωση των 2 μοτέρ με 2 μακριές βίδες των 2cm στα 2 αλουμινένια στηρίγματα.
3. Αφού βιδώσουμε τα αλουμινένια στηρίγματα στα 2 μοτέρ, τοποθετούμε τις ρόδες στην αντίστοιχη θέση των μοτέρ.
Η τοποθέτηση γίνεται απλώς κουμπώνοντάς τες όπως στην εικόνα.
Στη συνέχεια παίρνουμε τη ρόδα ελεύθερης κίνησης και τοποθετούμε με 4 κοντές βίδες τους 4 μεταλλικούς αποστάτες όπως φαίνεται στο σχήμα.
Η τοποθέτηση γίνεται απλώς κουμπώνοντάς τες όπως στην εικόνα.
Στη συνέχεια παίρνουμε τη ρόδα ελεύθερης κίνησης και τοποθετούμε με 4 κοντές βίδες τους 4 μεταλλικούς αποστάτες όπως φαίνεται στο σχήμα.
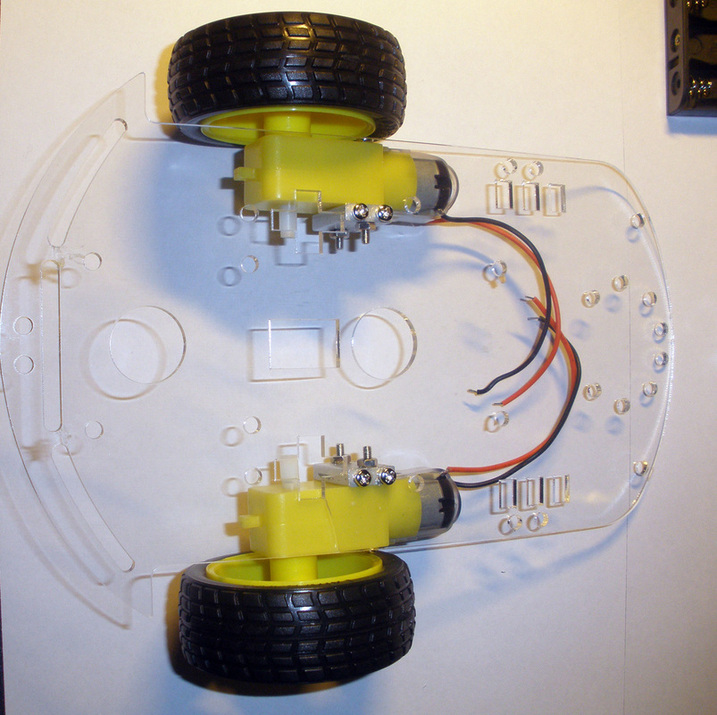
4. Στη συνέχεια με 2 μακριές βίδες για κάθε μοτέρ-τροχό, βιδώνουμε τα αλουμινένια στηρίγματα στην πλαστική διαφανή βάση, όπως στο σχήμα.
Προσοχή, τα καλώδια των μοτέρ να είναι προς το εσωτερικό του οχήματος, όπως στην εικόνα.
Προσοχή, τα καλώδια των μοτέρ να είναι προς το εσωτερικό του οχήματος, όπως στην εικόνα.
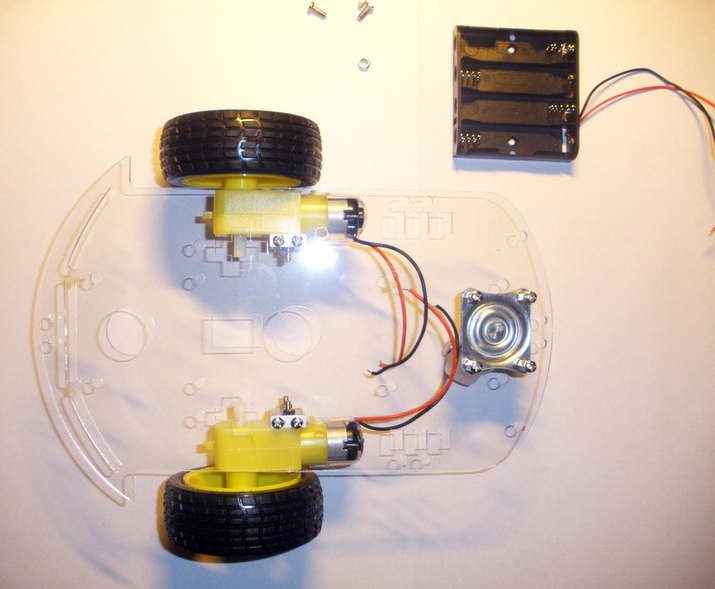
5. Στη συνέχεια με 4 κοντές βίδες, βιδώνουμε τη ρόδα ελεύθερης κίνησης στη βάση, όπως στην εικόνα.
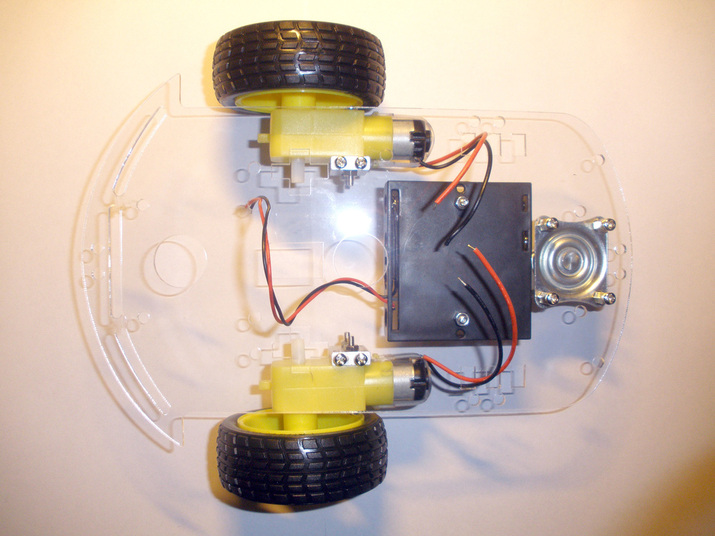
6. Τέλος με 2 μακριές βίδες και παξιμάδια στηρίζουμε τη μπαταριοθήκη στη βάση, από την πλευρά που είναι τα μοτέρ.
Θα μπορούσαμε να κάνουμε την τοποθέτηση και από πάνω, αλλά έτσι έχουμε άφθονο χώρο στο σασσί για την τοποθέτηση του μικροελεγκτή, του breadboard και να κάνουμε τις συνδέσεις μας, αφού όλη η επάνω πλευρά της βάσης είναι τελείως ελεύθερη.
Το σασσί μας τώρα είναι έτοιμο!
Θα μπορούσαμε να κάνουμε την τοποθέτηση και από πάνω, αλλά έτσι έχουμε άφθονο χώρο στο σασσί για την τοποθέτηση του μικροελεγκτή, του breadboard και να κάνουμε τις συνδέσεις μας, αφού όλη η επάνω πλευρά της βάσης είναι τελείως ελεύθερη.
Το σασσί μας τώρα είναι έτοιμο!
