Χαρακτηριστικά
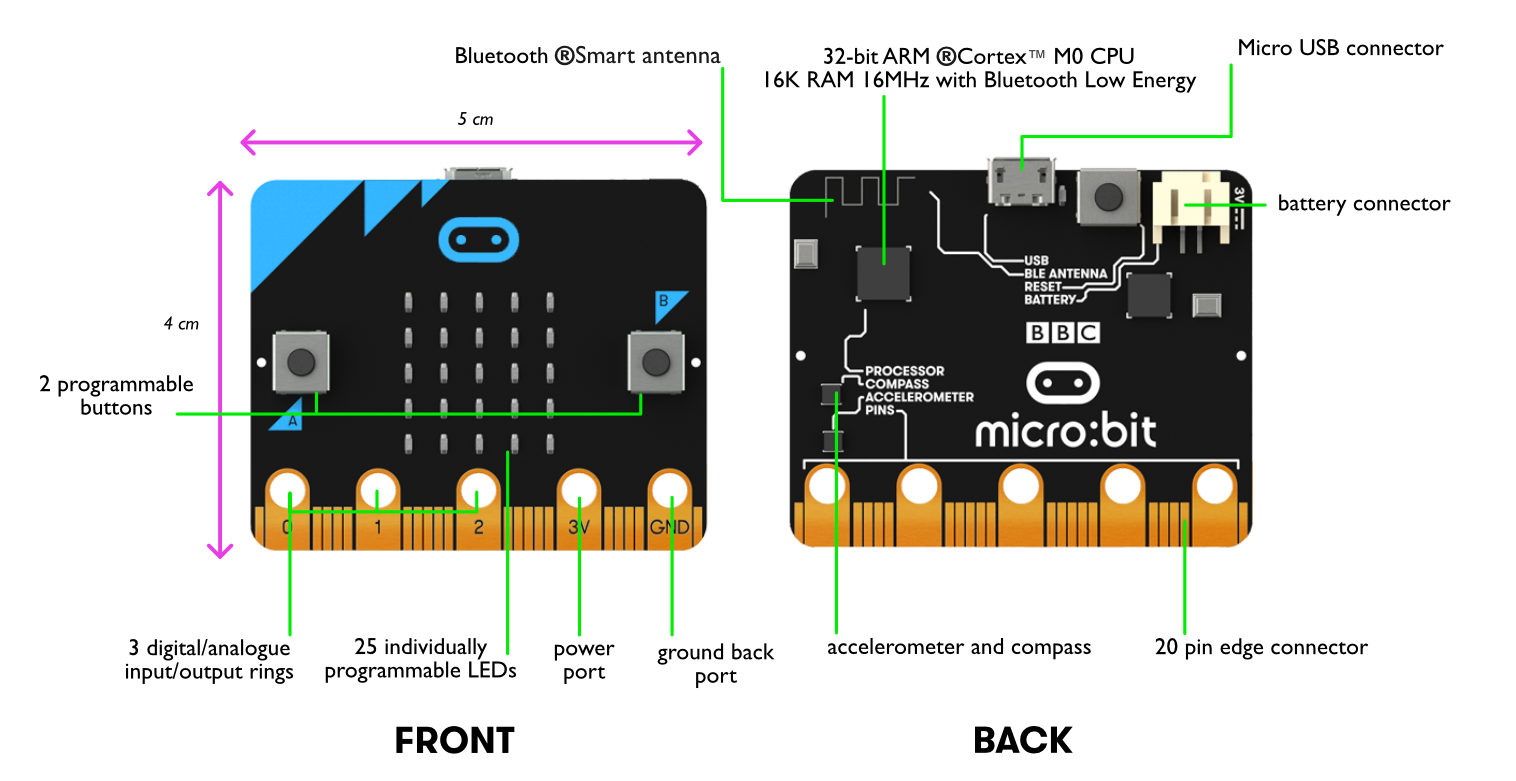
Το micro:bit έχει τα παρακάτω φυσικά χαρακτηρισιτκά:
- 25 ξεχωριστά - προγραμματιζόμενα LEDs
- 2 προγραμματιζόμενα κουμπιά
- Ακίδες (pins) για φυσικές συνδέσεις
- Αισθητήρα φωτός και θερμοκρασίας
- Αισθητήρα κίνησης (επιταχυνσιόμετρο και πυξίδα)
- Ασύρματη επικοινωνία μέσω ραδιοκυμάτων και Bluetooth
- διασύνδεση USB
|
LEDs
Τα LEDs ( Light Emitting Diodes) δίοδοι εκπομπής φωτός, χρησιμοποιούνται ευρέως σε πολλές συσκευές ως ενδεικτικές λυχνίες ή για φωτισμό. Το micro:bit διαθέτει 25 ξεχωριστά προγραμματιζόμενα LEDs που μας επιτρέπουν να εμφανίσουμε κείμενο, αριθμούς και εικόνες |
|
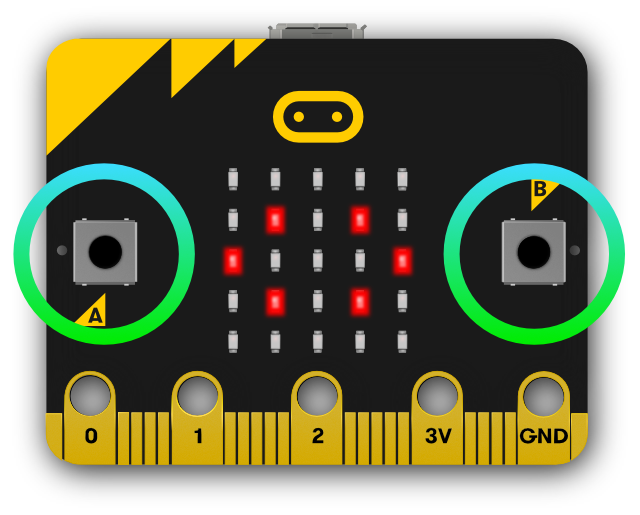
Κουμπιά (Buttons)
Υπάρχουν δύο κουμπιά μπροστά στο micro:bit (εμφανίζονται με την επιγραφή Α και Β). Μπορούμε να ανιχνεύσουμε πότε αυτά τα κουμπιά πατήθηκαν, ώστε να εκτελείται κάποιος κώδικας στη συσκευή. |
|
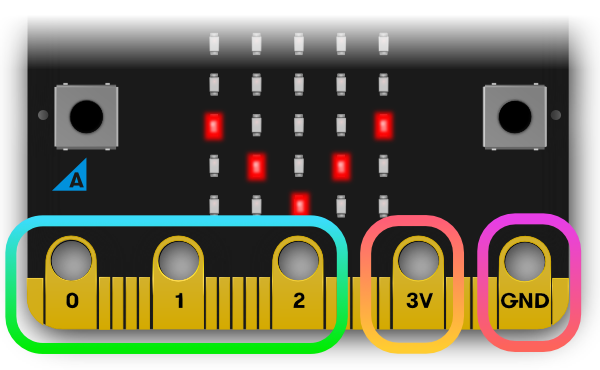
Ακροδέκτες σύνδεσης (PINs)
Υπάρχουν 25 εξωτερικοί ακροδέκτες στο κάτω μέρος του micro:bit που τα ονομάζουμε pins. Μέσω αυτών το micro:bit μπορεί να επικοινωνήσει ενσύρματα με τον εξωτερικό κόσμο. Μπορούμε έτσι να συνδέσουμε κινητήρες, LEDs, αισθητήρες και άλλες ηλεκτρικές και ηλεκτρονικές διατάξεις. |
|
Αισθητήρας φωτός (Light Sensor)
Το micro:bit μπορεί αντιστρέφοντας τη λειτουργία των LEDs, να τα χρησιμοποιήσει ως είσοδο, ανιχνεύοντας την παρουσία φωτός. |
|
Αισθητήρας θερμοκρασίας (Temperature sensor)
Αυτός ο αισθητήρας επιτρέπει στο micro:bit να ανιχνεύει την τρέχουσα θερμοκρασία σε βαθμούς κελσίου. |
|
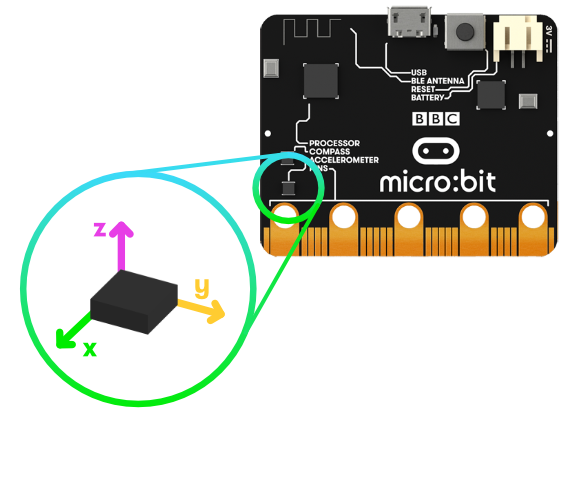
Επιταχυνσιόμετρο (Accelometer)
Το επιταχυνσιόμετρο μετρά την επιτάχυνση του micro:bit, άρα μπορεί να χρησιμοποιηθεί για να ανιχνεύει πότε το micro:bit μετακινηθεί. |

|
Πυξίδα (Compass)
Η πυξίδα (μαγνητόμετρο) είναι ένας αισθητήρας που μπορεί να ανιχνεύει το μαγνητικό πεδίο της γης, επιτρέποντας έτσι να προσδιορίζουμε την κατεύθυνση που το micro:bit δείχνει. Η πυξίδα θα πρέπει πριν χρησιμοποιηθεί να βαθμονομηθεί (calibration). |
|
Ραδιοεπικοινωνία (Radio)
To micro:bit διαθέτει δυνατότητα ασύρματης επικοινωνίας (μέσω ραδιοκυμάτων) με άλλες συσκευές ή άλλα micro:bit επιτρέποντας έτσι να κατασκευάσουμε παιχνίδια με πολλούς χρήστες κ.α. |
|
Bluetooth
To micro:bit διαθέτει μία κεραία BLE (Bluetooth Low Energy) που του επιτρέπει να στέλνει και να λαμβάνει σήματα Blutooth. Έτσι μπορεί να επικοινωνήσει ασύρματα με υπολογιστές, τηλέφωνα, tamplets. Μπορούμε έτσι για παράδειγμα να ελέγξουμε το τηλέφωνό μας από το micro:bit ή να στείλουμε δεδομένα και εντολές στο micro:bit από το κινητό μας τηλέφωνο. Πριν την επικοινωνία μέσω Bluetooth θα πρέπει να γίνει κατάλληλη ζεύξη των δύο συσκευών. |
|
Διασύνδεση USB
Η διασύνδεση USB επιτρέπει στο micro:bit να συνδεθεί με τον υπολογιστή μας μέσω ενός micro-USB καλωδίου. Μέσω αυτού, μπορούμε να μεταφέρουμε τα προγράμματά μας στο micro:bit αλλά ταυτόχρονα από το ίδιο καλώδιο παρέχουμε την κατάλληλη τάση τροφοδοσίας για τη λειτουργία του micro:bit. |
